Compilation Process#
The complete SiliconCompiler compilation is handled by a single call to the Project.run() function.
Within that function call, a static data flowgraph, consisting of nodes and edges is traversed and “executed.”
The static flowgraph approach was chosen for a number reasons:
Performance scalability (“cloud-scale”)
High abstraction level (not locked into one language and/or shared memory model)
Deterministic execution
Ease of implementation (synchronization is hard)
The Flowgraph#
Nodes and Edges#
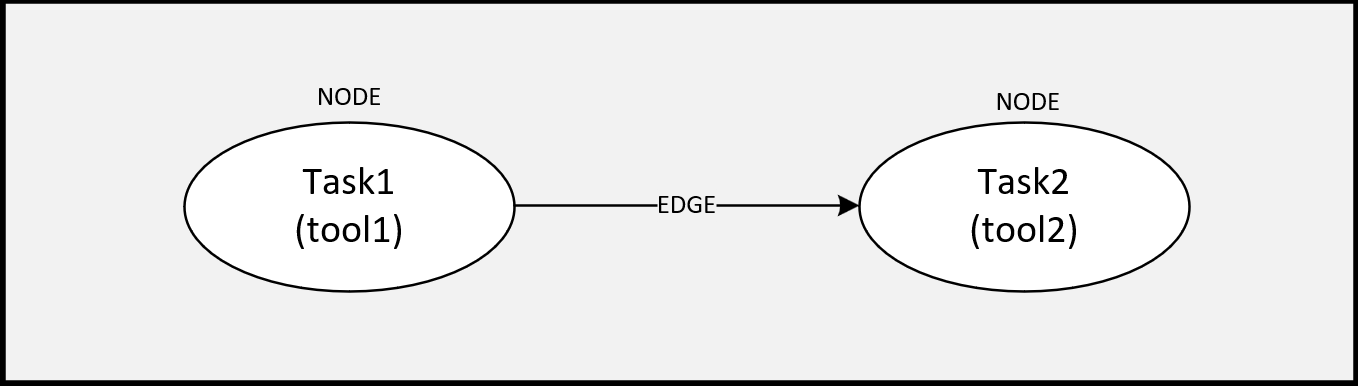
A SiliconCompiler flowgraph consists of a set of connected nodes and edges, where:
An edge is the connection between those tasks, specifying execution order.
Tasks#
SiliconCompiler breaks down a “task” into an atomic combination of a step and an index, where:
A step is defined as discrete function performed within compilation flow such as synthesis, linting, placement, routing, etc, and
An index is defined as variant of a step operating on identical data.
An example of this might be two parallel synthesis runs with different settings after an import task.
The two synthesis “tasks” might be called syn/0 and syn/1, where:
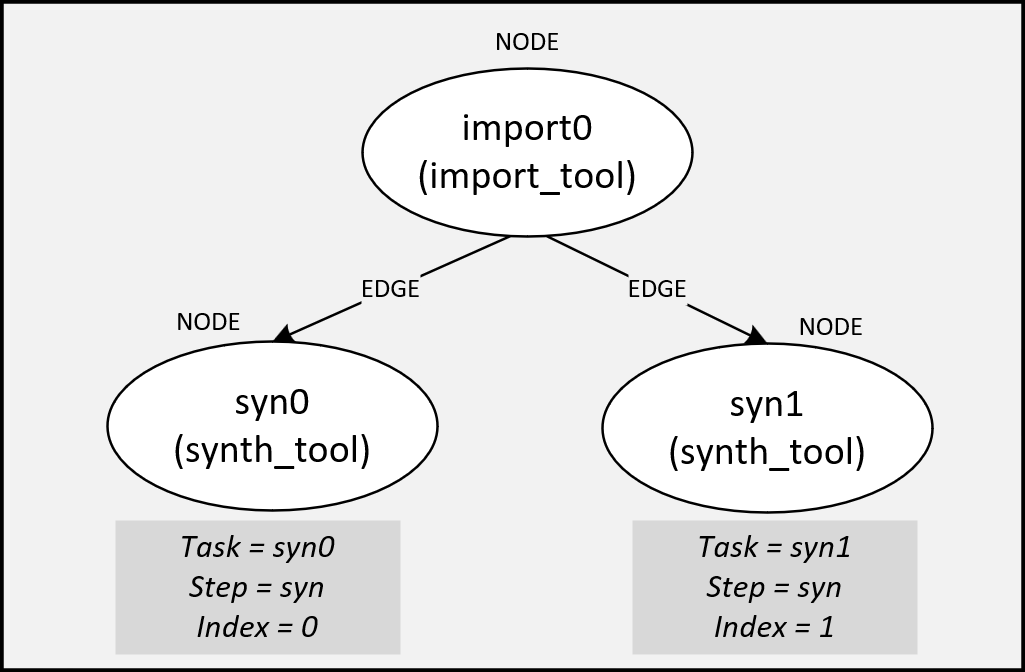
See using index for optimization for more information on why using indices to build your flowgraph are helpful.
Execution#
Flowgraph execution is done through the Project.run() function which checks the flowgraph for correctness and then executes all tasks in the flowgraph from start to finish.
Flowgraph Examples#
The flowgraph, used in the asic demo, is a built-in compilation flow, called asicflow. This compilation flow is a pre-defined flowgraph customized for an ASIC build flow, and is called through the Project.add_dep() function, which calls a pre-defined PDK module that uses the asicflow flowgraph.
You can design your own project compilation build flows by easily creating custom flowgraphs through:
Flowgraph.node()/Flowgraph.edge()methods
The user is free to construct a flowgraph by defining any reasonable combination of steps and indices based on available tools and PDKs.
A Two-Node Flowgraph#
The example below shows a snippet which creates a simple two-step (import + synthesis) compilation pipeline.
flow = Flowgraph('synonlyflow')
flow.node('elaborate', elaborate.Elaborate()) # use surelog for import
flow.node('syn', syn_asic.ASICSynthesis()) # use yosys for synthesis
flow.edge('elaborate', 'syn') # perform syn after import
At this point, you can visually examine your flowgraph by using Flowgraph.write_flowgraph(). This function is very useful in debugging graph definitions.
flow.write_flowgraph("flowgraph.svg", landscape=True)

Note
[In Progress] Insert link to tutorial which has step-by-step instruction on how to set up this flow with libs and pdk through run and execution.
Using Index for Optimization#
The previous example did not include any mention of index, so the index defaults to 0.
While not essential to basic execution, the ‘index’ is fundamental to searching and optimizing tool and design options.
One example use case for the index feature would be to run a design through synthesis with a range of settings and then selecting the optimal settings based on power, performance, and area. The snippet below shows how a massively parallel optimization flow can be programmed using the SiliconCompiler Python API.
flow.node('synmin', minimum.MinimumTask())
# create node for each syn strategy (first node called import and last node called synmin)
# and connect all synth nodes to both the first node and last node
for index in range(7):
# Create synthesis node
flow.node('syn', syn_asic.ASICSynthesis(), index=str(index))
# Connect synthesis node to elaborate
flow.edge('elaborate', 'syn', head_index=str(index))
# Connect synthesis node to minimization
flow.edge('syn', 'synmin', tail_index=str(index))
# set synthesis metrics that you want to optimize for
for metric in ('cellarea', 'peakpower', 'standbypower'):
flow.set('syn', str(index), 'weight', metric, 1.0)

Note
[In Progress] Provide pointer to a tutorial on optimizing a metric